
Servo Motors
Synchronous vs Asynchronous AC Servomotors
Nov
Have you ever wondered how a military grade robotic vehicle is used in bomb detention? Or how an antenna positioning system controls the precision of azimuth and elevation? How a Tesla Roadster can go from 0-60mph in 1.9 seconds? Maybe, how a metal cutting and forming machine provides precise motion for milling, lathes, and bending in metal fabrication?
Some of the most common industrial and commercial applications rely on the precision and efficiency of servomotors to perform daily and repetitive tasks. Because of the reliance on precision and accuracy is so necessary these type of applications are often limited to a closed-loop system. 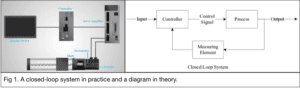
A closed-loop system allows for a highly regulated and automated process to be set with no human interaction. A display screen is used as GUI for humans to monitor the input and feedback of the system. A servo controller is used to track the command inputs and improve the system’s disturbance rejection. An amplifier, often referred to as the servo-drive or servo-amplifier, provides a controlled amount of voltage to the motor based on predetermined controller settings. Ultimately, the information is fed to the servomotor. Feedback is then provided via the encoder, often built into the servomotor, and acts as a sensor providing speed and positional feedback of the motor shaft. The beauty of this contained system is that it allows for precise control throughout the system while continuously providing feedback of the speed, acceleration, and position of the motor shaft.
In the broadest terms servomotors are categorized as either AC or DC. The fundamental difference being the ability to the control the speed of the motor. The speed of an AC motor is determined by the frequency of the applied voltage and the number of magnetic poles in the motor. Whereas the speed of a DC motor is directly proportional to the supply voltage with a constant load. This is an important distinction when choosing a motor to best fit the intended application. To stay within the scope of this article I will only be comparing AC servomotors.
AC Motors: Synchronous vs Asynchronous
AC motors can be further divided into two categories: synchronous and asynchronous, which is dependent upon the speed of the rotating magnetic field. An AC synchronous motor, when at a steady state, rotates the shaft in sync with the frequency of the applied current. Or in other words the rotor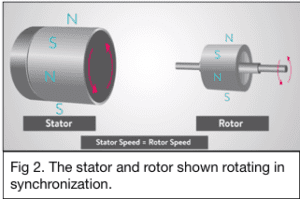 (the inside part) rotates at the same speed as the stator’s (the outside part) magnetic field. The rotor consists of a permanent magnet. So when the stator is excited with voltage the rotor follows the rotating field of the stator at the same speed and this is where the synchronous type is derived. Since this is a permanent magnet rotor no rotor current is required. So, when the stator field de energizes and stops, the rotor also stops. These motors have higher efficiency due to the absence of rotor current. This is especially useful in applications where constant speed, high torque, and/or a dynamic process is a necessity. Synchronous motors can often be found in generators, robotic actuators, turntables, ceiling fans, electrical clocks, and even the Tesla Model 3.
(the inside part) rotates at the same speed as the stator’s (the outside part) magnetic field. The rotor consists of a permanent magnet. So when the stator is excited with voltage the rotor follows the rotating field of the stator at the same speed and this is where the synchronous type is derived. Since this is a permanent magnet rotor no rotor current is required. So, when the stator field de energizes and stops, the rotor also stops. These motors have higher efficiency due to the absence of rotor current. This is especially useful in applications where constant speed, high torque, and/or a dynamic process is a necessity. Synchronous motors can often be found in generators, robotic actuators, turntables, ceiling fans, electrical clocks, and even the Tesla Model 3.
Asynchronous AC motors, often called induction motors, are characterized by the rotor rotating at a speed slower than a stator’s rotating magnetic field. The speed can be varied utilizing several control methods such as changing the number of poles or changing the frequency. The stator winding is fed with an AC power supply. This produces an alternating flux field that revolves with synchronous speed. This revolving flux is called a rotating magnetic field (RMF) and according to Faradays Law, the RMF causes an induced electromagnetic force (IMF) in the rotor conductors. A rotor flux is thus produced. 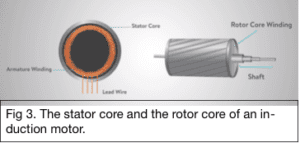 The rotor flux rotates in the same direction as the stator flux but does not succeed in catching up to the stator flux speed, hence where the type asynchronous is derived. Because induction motors are unable to maintain a constant speed under variable load torques but are cheaper and easier to operate they are often found in smaller applications such as toys, mixers, electric shavers, drilling machines, etc. In an industrial setting they are more often used in lifts, cranes, textile machines, larges fans, etc.
The rotor flux rotates in the same direction as the stator flux but does not succeed in catching up to the stator flux speed, hence where the type asynchronous is derived. Because induction motors are unable to maintain a constant speed under variable load torques but are cheaper and easier to operate they are often found in smaller applications such as toys, mixers, electric shavers, drilling machines, etc. In an industrial setting they are more often used in lifts, cranes, textile machines, larges fans, etc.
Differences of Synchronous vs Asynchronous Servomotors: a brief table summary of how the make-up of AC servomotors allows them to be useful in different and diverse operational capacities.
No. | Synchronous Motor | Asynchronous/Induction Motor |
1 | Complicated construction | Simpler construction |
2 | Not self start and requires a DC source is required for rotor excitation. | Self starting and rotor is induced via rotating electromagnetic field. |
3 | Speed is synchronous regardless of load | Speed is always less than synchronous but never synchronous |
4 | Speed control is not possible | Speed controlled using a Variable Frequency Drive (VFD) |
5 | Power factor can be adjusted to lagging, unity, or leading by varying excitation. | Induction motors always run at lagging power factor. |
6 | More efficient | Less efficient |
7 | Higher initial cost | Potential high lifetime cost |
8 | For high-precision applications | Used in many everyday applications |
9 | Most efficient in large industrial motor applications | Most efficient in smaller applications |
10 | Dependent on frequency (more consistent) | Speed varies on torque |
Conclusion:
While both being classified as AC servomotors, the construction and operational use of induction and synchronous motors is very different. Synchronous motors are best used in an environment that requires a constant motor speed but has varying load capacities. Although induction motors don’t operate well under varying load stresses a common technique to get the most out of an induction motor is to use a variable frequency drive (VFD) to mimic the ability of a synchronous motor.